схемы кинематики лазерного гравера
Когда слышишь ?схемы кинематики лазерного гравера?, многие сразу думают о сложных чертежах с кучей стрелочек и формул. На деле, если ты работаешь с оборудованием, как у нас в ООО ?Ухань Дуя Оптико-Электрическое Оборудование?, понимаешь, что суть не в идеальной картинке, а в том, как эта кинематика ведёт себя в цеху при +35 и вибрации от соседнего фрезера. Частая ошибка — брать готовые схемы как догму, не учитывая, что реальный износ направляющих или жёсткость станины меняют всю картину.
Базовые принципы и где кроются подводные камни
В основе большинства граверов — портальная или консольная схема. Казалось бы, всё просто: шаговики, ремни или шарико-винтовые пары, направляющие. Но вот нюанс: на бумаге траектория идеальна, а на практике при резком реверсе на высоких скоростях портал может ?залипать? из-за инерции. Это особенно заметно на больших форматах, где масса каретки значительна. Мы в своё время на тестах оборудования сталкивались с тем, что красивая схема от поставщика не учитывала дисбаланс при движении по оси Y с полной нагрузкой.
Ключевой момент — жёсткость. Схема кинематики должна быть не просто функциональной, а избыточной по жёсткости для конкретных задач. Например, для гравировки печатных плат с микронными допусками и для глубокой маркировки на стали — нужны разные подходы к конструкции. На нашем сайте https://www.doyalaser.ru в разделе про лазерные маркираторы как раз упоминается, что базовая платформа адаптируется под задачи, но это не просто слова. Адаптация — это часто пересмотр кинематики, замена линейных направляющих на более высокого класса, перерасчёт моментов.
Ещё один практический аспект — тепловыделение. Двигатели и приводы греются, длина станины меняется пусть на микроны, но для прецизионной гравировки это критично. В схемах редко указывают точки компенсации тепловых расширений, а это приходится выявлять опытным путём, иногда уже после запуска станка у клиента.
Опыт внедрения и типичные ошибки
Вспоминается случай с одним нашим лазерным маркиратором, который предназначался для нанесения штрих-кодов на алюминиевые профили. Схема кинематики была стандартной, портальной. Но в цеху оказалось, что профили подаются с конвейера с лёгким перекосом, и датчик позиционирования не успевал корректировать. Пришлось на месте дорабатывать — добавлять ?мягкую? связь в управлении, по сути, вносить поправки в алгоритм работы приводов, что не было заложено в исходной кинематической схеме. Это показало, что схема должна учитывать не только идеальное движение, но и возможность адаптации к внешним возмущениям.
Частая ошибка при выборе или оценке схемы — гнаться за максимальными скоростями, указанными в спецификации. Да, на бумаге скорость по осям X/Y может быть 2 м/с. Но при такой скорости на ременном приводе (который часто используют для удешевления) начинается проскальзывание или резонанс, и точность гравировки падает. Для твёрдых материалов это фатально. Поэтому в наших системах, особенно для резки и сварки, мы чаще склоняемся к шарико-винтовым парам для ответственных осей, даже если это дороже. Это решение родилось не из каталога, а из тестов на износ.
Ещё один момент — обслуживание. Самая элегантная кинематическая схема обесценивается, если для замены приводного ремня нужно разбирать полстанка. В проектировании мы теперь закладываем люки и быстросъёмные узлы. Это кажется мелочью, но для производственника это часы простоя. На сайте https://www.doyalaser.ru в описании оборудования мы акцентируем на надёжности, но за этой надёжностью стоит именно продуманная, ремонтопригодная кинематика.
Взаимосвязь кинематики, ПО и конечного результата
Схема кинематики — это не только ?железо?. Её воплощение в управляющей программе — отдельная тема. Бывало, идеально собранный станок с хорошей механикой начинал ?рисовать? ступеньки на окружностях. Проблема оказывалась не в люфтах, а в слишком грубом интерполировании в контроллере или в некорректно заданных ускорениях. Приходится подбирать эти параметры под конкретную механику, почти методом тыка, записывая осциллограммы с энкодеров.
Здесь важно понимание, что кинематика лазерного гравера — это замкнутая система. Например, при использовании линейных двигателей (что пока редкость в гравировке из-за цены) схема управления кардинально иная, чем для шаговых двигателей. Механика требует соответствующей электроники и софта. Мы в ООО ?Ухань Дуя Оптико-Электрическое Оборудование? при комплектации высокоточных моделей всегда тестируем эту связку на реальных задачах — например, на гравировке сложного штрих-кода Data Matrix, где каждый модуль должен быть чётким.
Интересный практический случай — гравировка на цилиндрических заготовках. Стандартная плоская схема кинематики не подходит, нужна дополнительная вращательная ось (ось C). Её интеграция в общую кинематическую схему — целое искусство. Важно синхронизировать линейное движение и вращение, чтобы не было искажений по шву. Наши инженеры отработали это на установках для маркировки труб, и теперь это стало отдельным компетенциями компании.
Материалы и долговечность конструкции
Выбор материалов для элементов кинематики напрямую влияет на её жизненный цикл. Алюминиевый портал — лёгкий и быстрый, но со временем может ?повести? под постоянной нагрузкой. Чугунная станина — тяжёлая, гасит вибрации, но и стоимость иная. В наших лазерных режущих системах, где нагрузки и температуры высоки, мы используем сварные стальные конструкции с последующей термообработкой для снятия напряжений. Это не прописано в кинематической схеме, но без этого вся точность схемы со временем уйдёт в ноль.
Направляющие — отдельная история. Шлифованные валы или рельсовые направляющие? Для граверов с небольшой нагрузкой иногда хватает и валов. Но если речь о работе 24/7, как на многих производствах, то только рельсовые каретки с предварительным натягом. Их расчёт на размещение и крепление — часть кинематической схемы. Ошибка в расстоянии между опорами вала может привести к прогибу и потере точности на середине хода, что мы однажды с горем пополам выявили на ранней модели маркиратора.
Смазка и защита. Пыль от гравировки, особенно органических материалов, — убийца для любой кинематики. Схема должна включать эффективные системы защиты — сильфоны, кожухи. Мы убедились, что даже самые лучшие направляющие быстро выходят из строя без защиты в запылённой атмосфере. Поэтому теперь это обязательный пункт при проектировании, о чём мы информируем клиентов на https://www.doyalaser.ru, описывая особенности эксплуатации.
Будущее и субъективные размышления
Куда движется развитие кинематических схем? Наблюдается тренд на интеграцию датчиков обратной связи непосредственно в механические узлы — для мониторинга износа, температуры, вибрации в реальном времени. Это уже не просто схема, а цифровой двойник кинематики. Для сервисных инженеров это золото. Возможно, скоро стандартом станет не просто PDF со схемой, а интерактивная 3D-модель с прогнозируемым износом.
С другой стороны, есть запрос на удешевление. Многие клиенты хотят приемлемое качество за минимальные деньги. Это вынуждает искать компромиссы в схемах — где-то поставить ремень вместо винта, где-то использовать менее жёсткую станину. Задача инженера — сделать так, чтобы эти компромиссы не ударили по ключевым параметрам для конкретной задачи. Иногда проще отказаться от заказа, чем поставить оборудование, которое не будет выполнять свою работу из-за упрощённой кинематики.
В итоге, для меня как практика, схемы кинематики лазерного гравера — это живой документ. Он начинается с расчётов, проходит через этап испытаний в цехах ООО ?Ухань Дуя Оптико-Электрическое Оборудование?, обрастает пометками и доработками и только потом становится той самой надёжной основой, которая годами работает у заказчика. Главное — не бояться отступать от идеальной схемы, если реальность вносит свои коррективы. Именно этот опыт, а не голая теория, и позволяет поставлять то самое высококачественное лазерное оборудование, которое мы декларируем.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Волоконный лазерный маркиратор летящих объектов
Волоконный лазерный маркиратор летящих объектов -
 Ультрафиолетовый лазерный маркиратор летящих объектов
Ультрафиолетовый лазерный маркиратор летящих объектов -
 Роботизированный лазерный сварочный аппарат
Роботизированный лазерный сварочный аппарат -
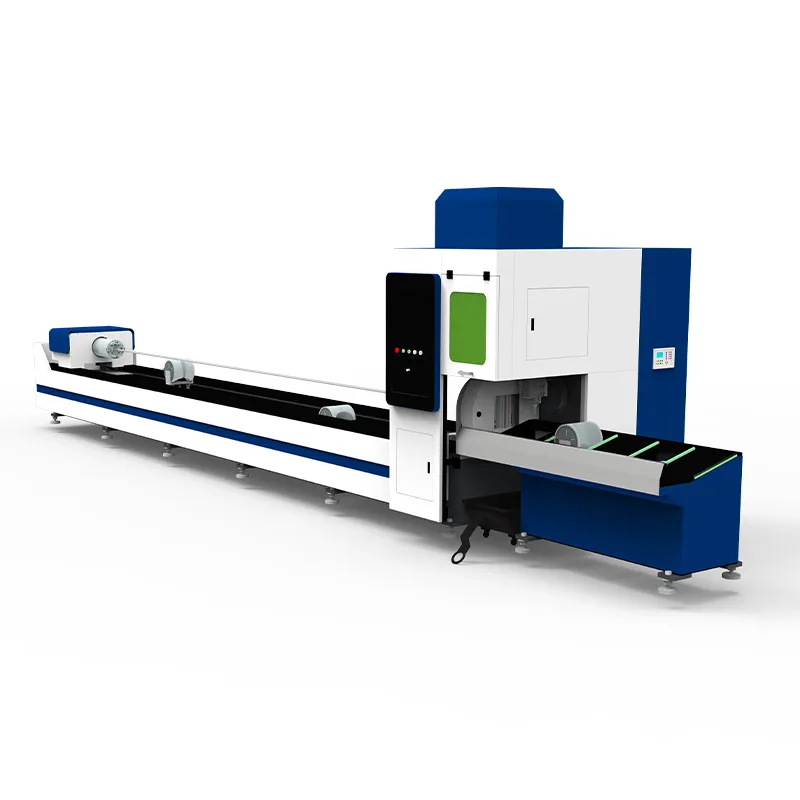
 Волоконный лазерный резак для листов и труб
Волоконный лазерный резак для листов и труб -
 Волоконный лазерный маркиратор
Волоконный лазерный маркиратор -
 Ручной лазерный сварочный аппарат с воздушным охлаждением
Ручной лазерный сварочный аппарат с воздушным охлаждением -
 Специализированный волоконный лазерный трубогиб
Специализированный волоконный лазерный трубогиб -
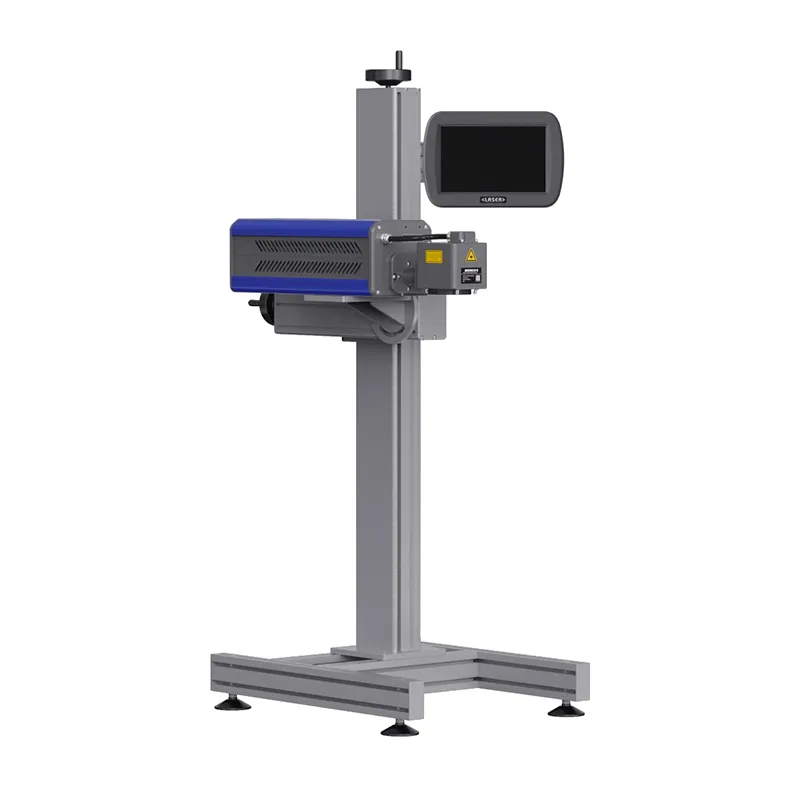 Углекислотный лазерный маркиратор летящих объектов
Углекислотный лазерный маркиратор летящих объектов -
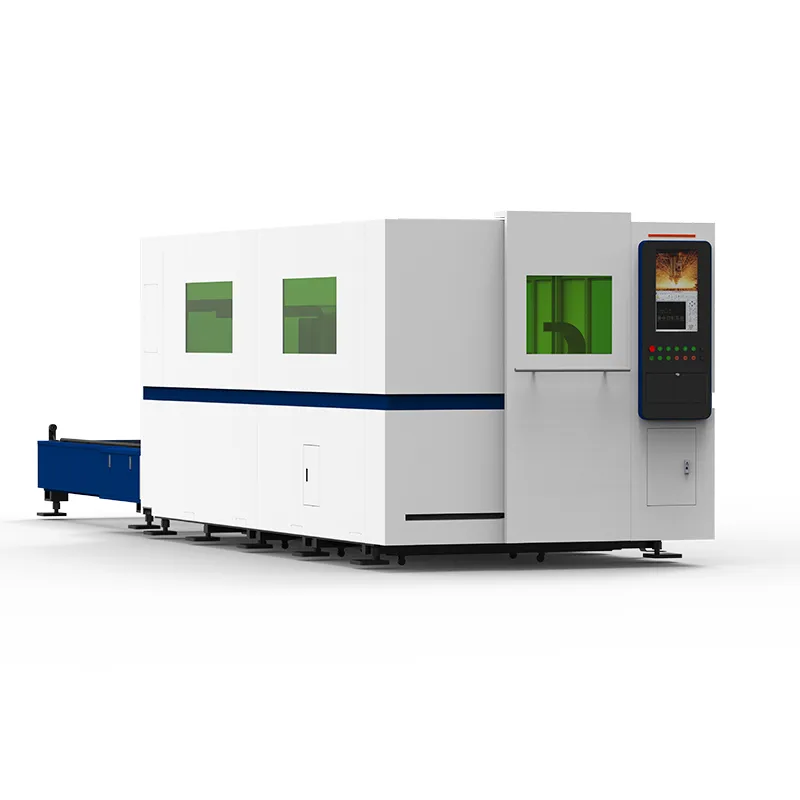 Высокоскоростной волоконный лазерный резак с полным ограждением
Высокоскоростной волоконный лазерный резак с полным ограждением -
 Лазерный очиститель анилоксовых валов
Лазерный очиститель анилоксовых валов -
 Автоматический лазерный сварочный аппарат с платформой
Автоматический лазерный сварочный аппарат с платформой -
 Одноплатформенный волоконный лазерный резак
Одноплатформенный волоконный лазерный резак





